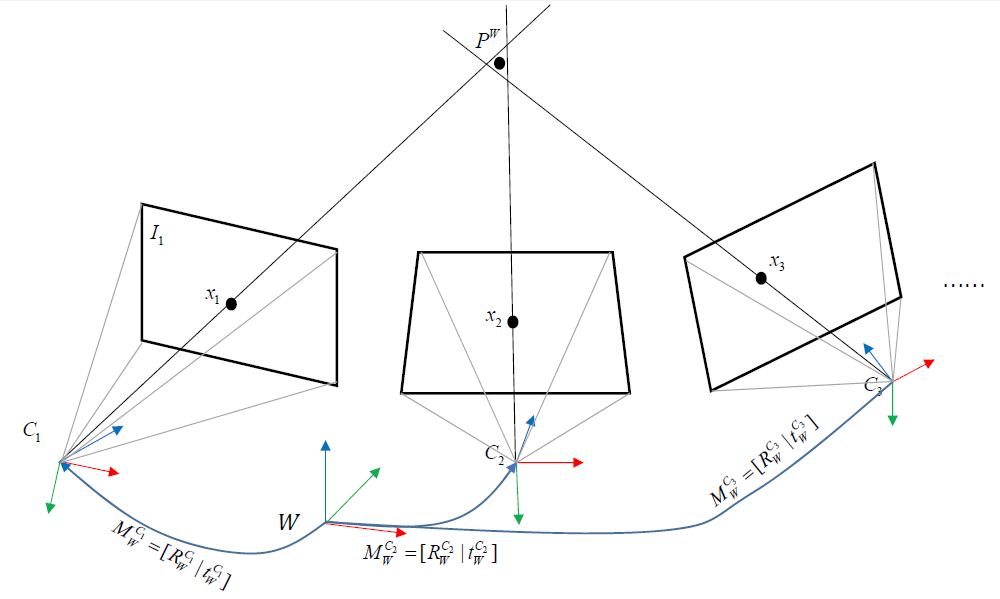
To find out the feature point in world coordinate when it is observed at least in two camera frames
Given:
- 2D image observations [u,v] in multiple frames.
- Camera intrinsic matrix K.
- Camera poses [,] for each observation frame: it is from world frame to each camera frame
Theory
Homogeneous Method
- From Equation (1)
- Do the Cross Product on both side
- Transform into Skew Symmetric Matrix
Since row3 is linearly dependant on row1 & row2, so we need another set of Equation(2) in order to recover the 3D Position of the feature point.
- We can solve the Equation(2) by using Singular Value decomposition. Since P is Homogeneous Coordinates, so we need to homogeneous V by .
- When there is noise in the measurement, could be a value that is close to zero. Then the recovered position from P might be a infinity point. This is a problem of doing triangulation by homogeneous method.
Non-Homogeneous Method
Code Implementation
Homogeneous Method