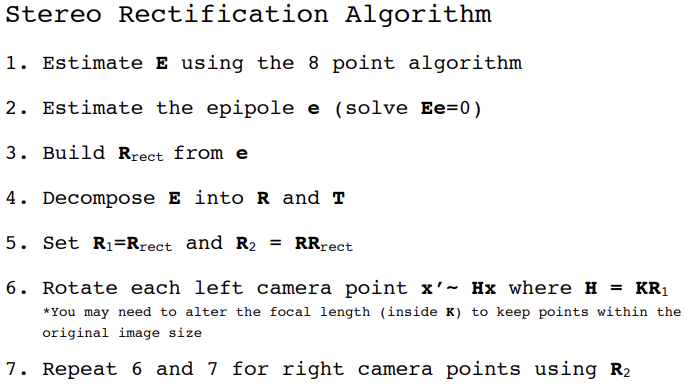
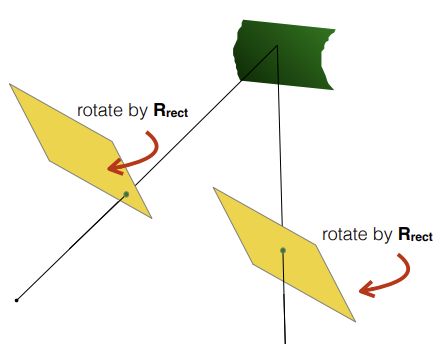
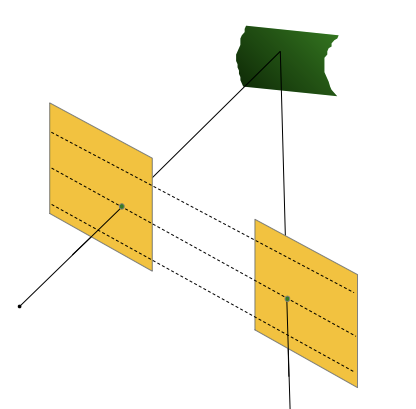
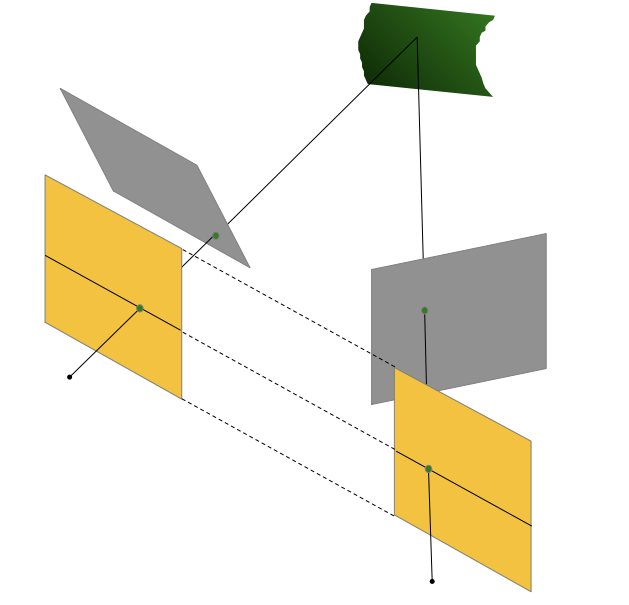
Stereo Rectification
- Reproject image planes onto a common plane parallel to the line between camera centers
- Need two homographies (3x3 transform), one for each input image reprojection
- Steps
- Rotate the right camera by R (aligns camera coordinate system orientation only)
- Rotate (rectify) the left camera so that the epipole is at infinity
- Rotate (rectify) the right camera so that the epipole is at infinity
- Adjust the scale


https://www.cs.cmu.edu/~16385/s17/Slides/13.1_Stereo_Rectification.pdf